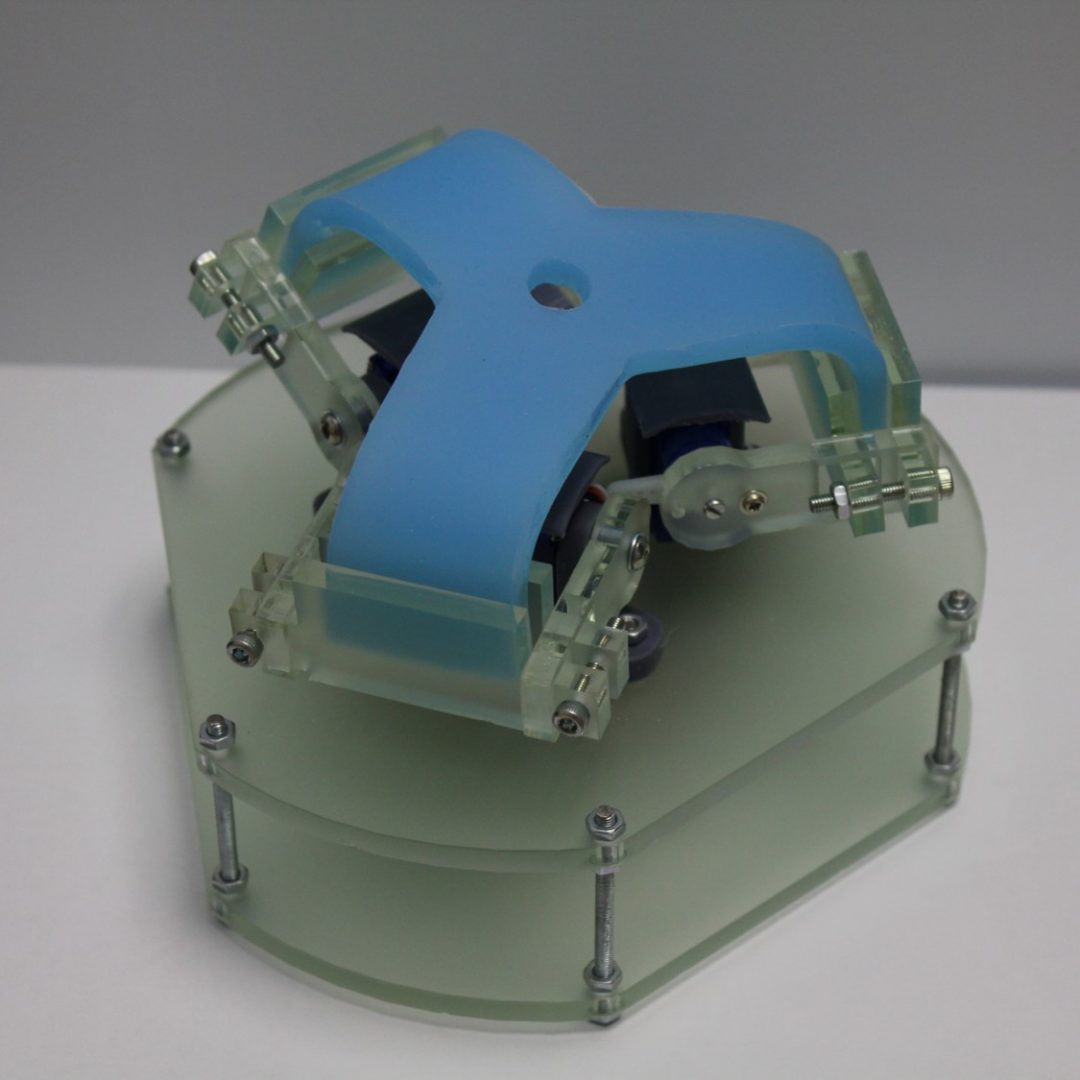
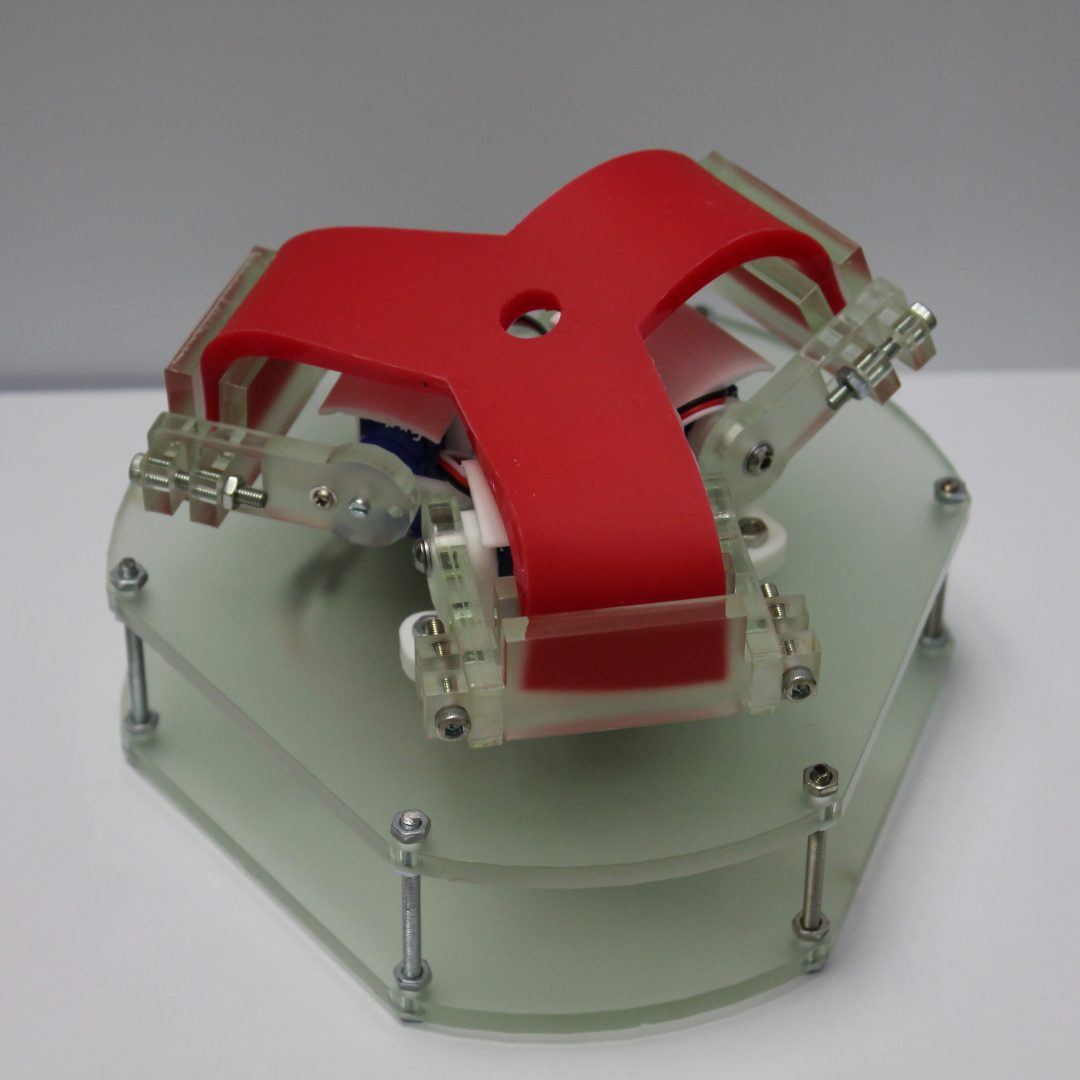
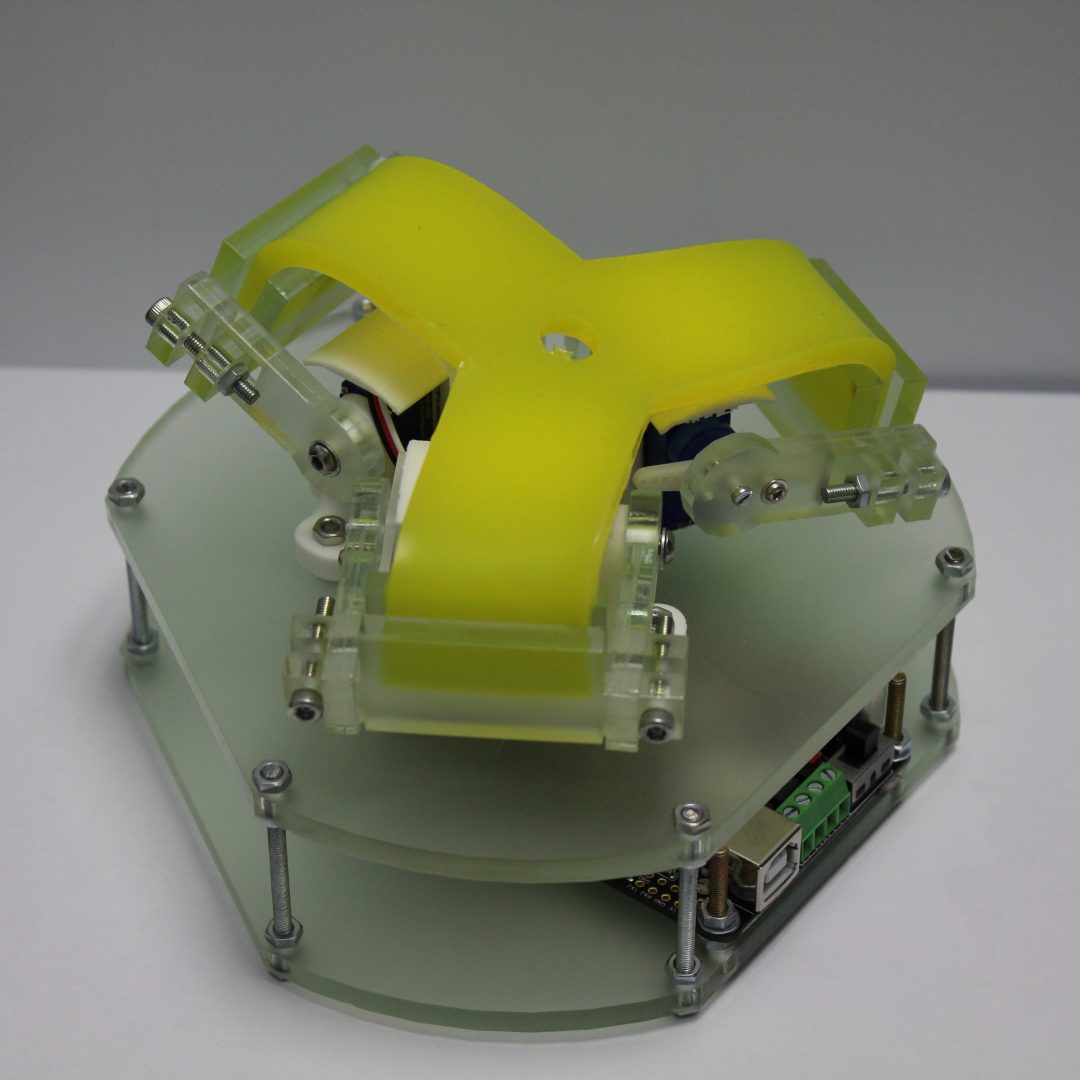
In order to build your own Tripod, you will need to *** the list of components on the right. You have the choice between 3D-printing all the hard pieces of the robot – in which case you will need the .** files – or laser-cutting most of these parts – see the .** files – and only 3D-printing the pieces that secure the servomotors. We don’t currently provide ready-to-assemble kits, so you will also need to purchase the MakeBlock MegaPi board and the three MakeBlock ** servomotors, as well as the bolts, nuts and washers listed below. The detailed instructions are presented hare after and can be downloaded here *link*. You can also follow us building a Tripod in the video below. If you have any questions, please head to our Contact *link* section.
We also love to here about new Tripod owners, so don’t hesitate to send us pictures of your own robot!